





全部商(shāng)品
all products-

無人直升機
HQ-Z2
HQ-Z2無人直升機在成熟的烏克蘭AK1-3有人直升機平台上進行無人化改裝,将副駕駛的一(yī)套有人操控系統去(qù)掉,原位替換成一(yī)套具有自主知(zhī)識産權的UVCS —Universal VTOL Control System(通用垂直起降飛行器控制系統)無人操控系統,實現無人化駕駛,并且在需要時可以簡單切換爲手動模式,快速恢複成爲有人機。
産品詳情 -
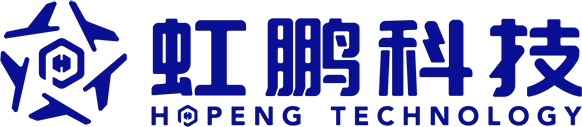
自主水下(xià)機器人
HP-4
HP-4是一(yī)款打破傳統水下(xià)市場的自主水下(xià)機器人産品。該産品具有性價比極高、操作簡易、靈活性和擴展性高等特點,既可通過搭載各種小(xiǎo)型聲學載荷實現水下(xià)探查,又(yòu)可搭載水聲通訊設備實現“蜂群"作業。并且該産品還提供開(kāi)放(fàng)硬件接口和―源控制系統軟件,便于開(kāi)展機器人在智能傳感、路徑規劃、運動控制、故障診斷、集群協作等研究項目。
産品詳情 -

自主水下(xià)機器人
HP-3
HP-3是一(yī)款模塊化開(kāi)源的水下(xià)自主機器人産品,主要面向科研、教育和水下(xià)探查等應用領域。該水下(xià)機器人采用模塊化設計,配置多組推進器,運動控制精準靈活,預留接口豐富,操控模式多樣,傳感器、數據和控制接口等軟件代碼全部開(kāi)源。
産品詳情 -

自主水下(xià)機器人
HP-2
HP-2自主水下(xià)機器人采用了模塊化設計技術,一(yī)體(tǐ)化集成全自主知(zhī)識産權的自動駕駛單元、高精度導航模塊、高清成像聲呐、新型推進器等核心模塊,具備自主導航和智能作業能力,可由雙人便攜操作,完成海洋環境監測、水下(xià)目标搜索定位、海洋高清探查、石油管線和海底電纜巡檢等任務。
産品詳情 -
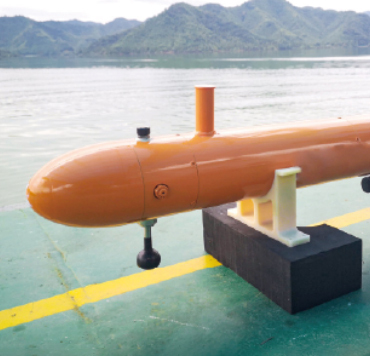
高速巡邏無人艇
高速巡邏無人艇具有偵察監視、目标搜索識别、快速響應、實時打擊能力,可長時間對港口、海灣、海上石油平台以及重要沿海目标附近區域進行水上目标偵察監視。同時通過搭載輕型自動武器系統,可執行打擊可疑船隻、恐怖分(fēn)子、海盜等海上攔截任務以保護港口、碼頭周邊安全。高速巡邏無人艇具有機動性強、全天時工(gōng)作、環境适應能力強等特點。
産品詳情 -

水下(xià)破拆作業工(gōng)具組
剪切器由剪切器主機、浮力調節裝置、液壓管路及動力源組成,可由潛水員(yuán)攜帶開(kāi)展水下(xià)物(wù)體(tǐ)的剪切作業。
産品詳情
- 地址:廣西南(nán)甯市高新技術産業開(kāi)發區科園大(dà)道68号南(nán)甯軟件園二期13号樓第13層1303号
- 郵箱:gxhpkj@foxmail.com
- 電話(huà):0771-3396208

關注公衆号

進入小(xiǎo)程序