-
當前位置:
虹鵬首頁>
産品商(shāng)城>
潛水項目>
自主水下(xià)機器人

自主水下(xià)機器人
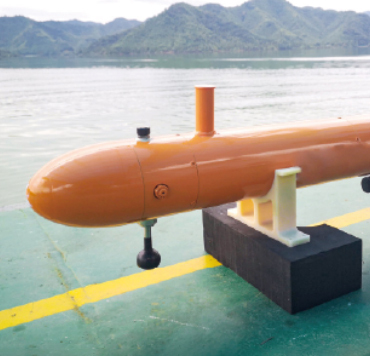
HP-3
HP-3是一(yī)款模塊化開(kāi)源的水下(xià)自主機器人産品,主要面向科研、教育和水下(xià)探查等應用領域。該水下(xià)機器人采用模塊化設計,配置多組推進器,運動控制精準靈活,預留接口豐富,操控模式多樣,傳感器、數據和控制接口等軟件代碼全部開(kāi)源。
- 産品詳情
- 定制選配
- 相關視頻(pín)
1.易于使用:便攜式設計,小(xiǎo)體(tǐ)積,易操作
2.硬件模塊化、軟件開(kāi)源:滿足用戶運動控制,聲學和光學圖像處理,跟蹤定位,水下(xià)通信組網,水下(xià)機器人集群等研究課題
3.操縱性好、控制模式多樣:配置娓部推進1組,前後側推各1組,前後垂推各1組,可實現水下(xià)懸停定位、精确軌迹控制、原地轉彎等複雜(zá)操作
4.傳感器豐富:水下(xià)攝像機、成像聲呐、姿态傳感器、深度傳感器、聲學多普勒計程儀等
5.擴展性良好:超短基線定位、水聲通信機、側掃聲呐、合成孔徑聲呐、多波柬聲呐、SVP、CTD等
6.作業模式:具備水面無線遙控、光纖遙控和自主工(gōng)作等多種作業模式
7.配置模式:豐富靈活,可以滿足不同客戶的配置需求
8.用戶定制:全自主知(zhī)識産權,采用模塊化設計,可快速響應客戶的定制化需求


- 地址:廣西南(nán)甯市高新技術産業開(kāi)發區科園大(dà)道68号南(nán)甯軟件園二期13号樓第13層1303号
- 郵箱:gxhpkj@foxmail.com
- 電話(huà):0771-3396208

關注公衆号

進入小(xiǎo)程序